La batteria atomica potrebbe rappresentare la nuova rivoluzione nell\'ambito delle tecnologie energetiche. Questo tipo di batteria è basato su una tecnologia di nucleare miniaturizzato, capace di generare energia attraverso una reazione nucleare di fissione o fusione.Una delle principali caratterist...
\r\n\r\nLas Vegas, Nevada - L\'International Consumer Electronics Show (CES) del 2024 ha riunito migliaia di esperti, appassionati e aziende provenienti da tutto il mondo, svelando le ultime innovazioni tecnologiche che promettono di rivoluzionare la nostra quotidianità.La fiera, che si è svolta ...
Nel marzo scorso, l’annuncio di Humane, la startup guidata da Bethany Bongiorno e Imran Chaudhri, entrambi ex dipendenti di Apple, aveva scosso il settore tecnologico. Il loro progetto, un dispositivo AI “indossabile”, ha attirato oltre 241 milioni di dollari di finanziamenti, preparando il te...
La paura della Intelligenza Artificiale (I.A.) è una preoccupazione diffusa in molti settori della società. Essa si manifesta principalmente attraverso le paure riguardanti il possibile sviluppo di una I.A. superintelligente e autonomamente operante, che potrebbe mettere in pericolo l\'umanità o a...
\r\n\r\nAnello smart è un tipo di anello che incorpora diverse funzionalità tecnologiche avanzate. Questi anelli sono dotati di sensori elettronici, connettività wireless e una serie di funzionalità che possono includere notifiche di chiamate e messaggi, monitoraggio dell\'attività fisica, controllo...
L\'X-59 è un aereo supersonico in sviluppo dalla NASA. Il suo obiettivo principale è quello di superare la barriera del suono senza produrre un boom sonico, il rumore sonic boom che si verifica quando un aereo supera la velocità del suono. L\'aereo adotta una configurazione a ala a freccia e un\'ala...
La scrittura è senza dubbio una delle più grandi invenzioni dell\'umanità. Attraverso la scrittura, gli esseri umani sono stati in grado di conservare e trasmettere conoscenze, idee ed esperienze ai posteri. Prima dell\'invenzione della scrittura, le informazioni venivano trasmesse oralmente, il ch...
L\'arte in un futuro tecnologico potrebbe assumere forme completamente diverse da quelle che conosciamo oggi. La tecnologia, infatti, offre nuove possibilità per la creazione e la fruizione dell\'arte, grazie alla realtà virtuale, all\'intelligenza artificiale e alla stampa 3D.In primo luogo, la real...
Una domotica è una casa automatizzata che consente la gestione e la supervisione di tutti i dispositivi e sistemi elettronici della casa attraverso una rete. Questi sistemi sono controllati da un dispositivo mobile, touch screen o con la voce, consentendo all\'utente di programmare e personalizzar...
Come sarà il panorama tecnologico fra qualche anno e che innovazioni porterà? Abbiamo cercato di riassumere questo aspetto per renderlo piu\' vicino a voi. Cominciamo con: Internet of Things (IoT): dispositivi sempre più piccoli e con maggiore capacità di elaborazione consentiranno la connessio...
La televisione del futuro avrà molte caratteristiche innovative che offriranno una migliore esperienza di visione per gli spettatori. Alcune di queste caratteristiche potrebbero includere:\r\n\r\n Video a risoluzione ultra-alta: la televisione del futuro potrebbe avere una risoluzione video ancora pi�...
Le auto elettriche e quelle a idrogeno rappresentano le ultime novità nel settore dell\'automobilismo eco-sostenibile. Entrambi i tipi di veicoli sono alimentati da fonti di energia rinnovabile, con zero emissioni di gas di scarico, una maggiore efficienza energetica e una minore dipendenza dai comb...
La tecnologia sta migliorando costantemente, offrendo nuove opportunità in molti campi, tra cui l\'educazione, l\'intrattenimento, la comunicazione e i servizi sanitari. La multimedialità, d\'altra parte, si riferisce alla combinazione di differenti modalità espressive, audio, visive e testuali, in ...
Faccende, faccende, faccende. Noiose e purtroppo necessarie. Ma cosa succederebbe se i robot potessero aiutarvi a risparmiare la fatica? Abbiamo già gli inizi con gli elettrodomestici intelligenti. Stanno nascendo anche robot più grandi e più utili. Potremmo facilmente vivere in un futuro pieno...
Elon Musk ha reso noto il primo risultato delle attività di ricerca nel campo della robotica. L\'imprenditore californiano lo scorso anno aveva svelato il progetto di realizzazione di un robot umanoide, noto come Optimus : a distanza di un anno è arrivato un primo prototipo, che Musk ha definito \"u...
\r\n\r\nL’intelligenza artificiale ed i computer si integreranno cerebralmente con gli esseri umani.Il collegamento neurale di Elon Musk tratterà disturbi neurologici come l’Alzheimer, la lesione del midollo spinale, il Parkinson e la cecità. Questi chip cerebrali, saranno controllati dai comp...
Il mondo in cui viviamo sta cambiando, e a velocità che da esseri umani facciamo fatica a controllare. Il clima e i temi ambientali in genere stanno spingendo i potenti della Terra a fare serie riflessioni sul futuro e non sono poche le misure che nei prossimi 30 anni modificheranno nel profondo l...
Come saranno gli smartphone del futuro? Philippe Starck, il designer francese famoso anche per i suoi spremiagrumi dal disegno spaziale, ha provato a elaborare una personale visione dei dispositivi futuri. Useremo smartphone senza tastiera, con gli ologrammi, flessibili e dalle forme più disparate...

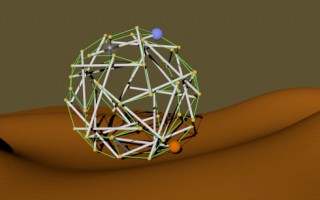 Il momento più problematico durante le missioni di esplorazione spaziale effettuate impiegando i rover (veicoli controllati da remoto) è rappresentato dall’atterraggio. Preservare l’integrità dell’attrezzatura di bordo non è una cosa semplice, soprattutto se si considerano le elevate velocità con le quali ci si avvicina al suolo dei pianeti, l’attrazione esercitata dai corpi celesti e la morfologia del terreno. Per risolvere il problema fino ad oggi sono stati impiegati costosi e complessi sistemi composti da paracadute e razzi in grado di rallentare la corsa.In futuro le cose potrebbero andare diversamente, come auspicato da Adrian Agogino, ricercatore dell’Intelligent Systems Division presso il NASA Ames Research Center. È sua l’idea del Super Ball Bot, un vero e proprio robot che a prima vista può sembrare un gomitolo di travi e cavi aggrovigliati. In realtà quella che pare una struttura confusa e poco funzionale è pensata per assorbire l’impatto con il suolo e disperderne l’energia generata in modo da non riportare danni semplicemente rimbalzando come una palla. Alla base di tutto un principio definito integrità tensionale, o “tensegrity” in inglese.Il robot assume una stesura flessibile e combatta, formata da elementi e materiali elastici, in grado di allungarsi e comprimersi, permettendo a SBB di atterrare in tutta sicurezza sul pianeta da esplorare, senza bisogno di paracaduti o di sistemi di atterraggi complessi.Per controllarlo si sta perfezionando una tecnologia chiamata Central Pattern Generators, che si basa su complessi algoritmi di intelligenza artificiale ed elementi in grado di generare un moto oscillatorio ispirandosi agli studi delle neuroscienze. Un mix vincente dunque, che permette al robot di muoversi in completa autonomia una volta atterrato sul pianeta, rotolando semplicemente su se stesso, in maniera tale di potersi adattare a qualsiasi tipo di terreno. Non è dato a sapere se e quando un robot di questo tipo potrà essere impiegato dalla NASA in una vera e propria missione spaziale.
Il momento più problematico durante le missioni di esplorazione spaziale effettuate impiegando i rover (veicoli controllati da remoto) è rappresentato dall’atterraggio. Preservare l’integrità dell’attrezzatura di bordo non è una cosa semplice, soprattutto se si considerano le elevate velocità con le quali ci si avvicina al suolo dei pianeti, l’attrazione esercitata dai corpi celesti e la morfologia del terreno. Per risolvere il problema fino ad oggi sono stati impiegati costosi e complessi sistemi composti da paracadute e razzi in grado di rallentare la corsa.In futuro le cose potrebbero andare diversamente, come auspicato da Adrian Agogino, ricercatore dell’Intelligent Systems Division presso il NASA Ames Research Center. È sua l’idea del Super Ball Bot, un vero e proprio robot che a prima vista può sembrare un gomitolo di travi e cavi aggrovigliati. In realtà quella che pare una struttura confusa e poco funzionale è pensata per assorbire l’impatto con il suolo e disperderne l’energia generata in modo da non riportare danni semplicemente rimbalzando come una palla. Alla base di tutto un principio definito integrità tensionale, o “tensegrity” in inglese.Il robot assume una stesura flessibile e combatta, formata da elementi e materiali elastici, in grado di allungarsi e comprimersi, permettendo a SBB di atterrare in tutta sicurezza sul pianeta da esplorare, senza bisogno di paracaduti o di sistemi di atterraggi complessi.Per controllarlo si sta perfezionando una tecnologia chiamata Central Pattern Generators, che si basa su complessi algoritmi di intelligenza artificiale ed elementi in grado di generare un moto oscillatorio ispirandosi agli studi delle neuroscienze. Un mix vincente dunque, che permette al robot di muoversi in completa autonomia una volta atterrato sul pianeta, rotolando semplicemente su se stesso, in maniera tale di potersi adattare a qualsiasi tipo di terreno. Non è dato a sapere se e quando un robot di questo tipo potrà essere impiegato dalla NASA in una vera e propria missione spaziale.{kind=link}